
Vulkan sum reduction
I started working on GPU languages in 2020 when I translated scikit random forest prediction algorithm to APL and then to SPIR-V. This work was part of my master thesis at Inria. In the thesis, I used Vulkan for network packet processing. The approach was much motivated by the co-dfns project. My thesis work also resulted in writing a Vulkan compute “engine” in Rust called rivi-loader.
Coincidentally, a series of blog posts by Raph Levien appeared which echoed the motivation of my approach:
Today, there are two main ways to run compute workloads on GPU. One is CUDA, which has a fantastic ecosystem including highly tuned libraries, but is (in practice) tied to Nvidia hardware. The other is graphics APIs used primarily for gaming, which run on a wide variety of hardware, but historically offer much less power than CUDA. Also, the tooling for compute in that space is terrible. Historically, a lot of compute has also been done with OpenCL, but its future is cloudy as it’s been officially deprecated by Apple, and GPU vendors are not consistently keeping their OpenCL implementations up to date.
Vulkan has been catching up fast in its raw capabilities, with recent extensions supporting more advanced GPU compute features such as subgroups, pointers, and a memory model. Is it getting to the point where it can run serious compute workloads?
In my thesis work I was able to use the so-called variable pointers, but it took me several years to find myself an excuse to make use of subgroups. As such, this post is about describing how to do subgroup-powered sum reduction in Vulkan compute, using raw SPIR-V.
Sum reduction on scalar values
In APL, sum reduction is coded as +/⍵. That is, suppose
⍵ is a vector v, then we
do an operation
\sum{v}
Efficient use of GPUs requires divide-and-conquer algorithms. This is because a GPU shader is launched with an invocation matrix I_M such that [x,y,z]. For example, I_M = [64,1,1] \implies \sum I = x * y * z.
First, let us consider a common practice when dealing with vectors. With vector v of length 64 and I_M = [64,1,1] we have v[i] = I_{M[x,1,1]}. E.g., with vector v = \{1,2,3..64\} accessing I[5] gives us v[5] = 6 (indexing starts at 0).
Each I is divided into partitions within subgroups (in CUDA terms, warps) S where s \subseteq S. Suppose the same vector v with length 64 and subgroup size \bar{s} is 32. Then, \sum S = \frac{v}{\bar{s}}. Coincidentally, this implies that subgroup s_i has elements from v[s_i+32]. To elaborate:
s_0 = v[0..31] s_1 = v[32..63]
Subgroups also have other properties. These are:
SubgroupSize (\bar{s}),
SubgroupId (s_i), and
SubgroupLocalInvocationId (denoted subsequently as s^j). As such, if we want to target element
v_i which has the value of 1, we find this from s_0^0. Similarly, s_1^0 would yield v[32] = 33.
The hard part of writing algorithms in a parallel settings is that the source code of the program denotes to a view of a single I, not the view of \sum I. Further, at runtime there is no way of evaluating \sum I. In other words, if we pass our vector v into a program with source code v + 1, what will happen is that the program yields us v = \{2,3,4..65\}. In other words, while the operation v + 1 is only written once, it will happen for \sum I times, which in our example happens to correspond to \bar{v}.
If we want to write a sum reduction in this paradigm, then the programming will become less trivial. In pseudocode, we could write:
this = v[I]
match I == 0
true => {
range val in (length v) {
this += val
}
},
false => {} // i.e., sleep
}While we will eventually get the sum of v in location I[0], this is non-optimal, because we sleep on I[1..63] while I[0] does all the work!
But, we can get away with more productive approach. This is where
subgroups become into play. As each subgroup handles a range of values
from v, we can command the whole range
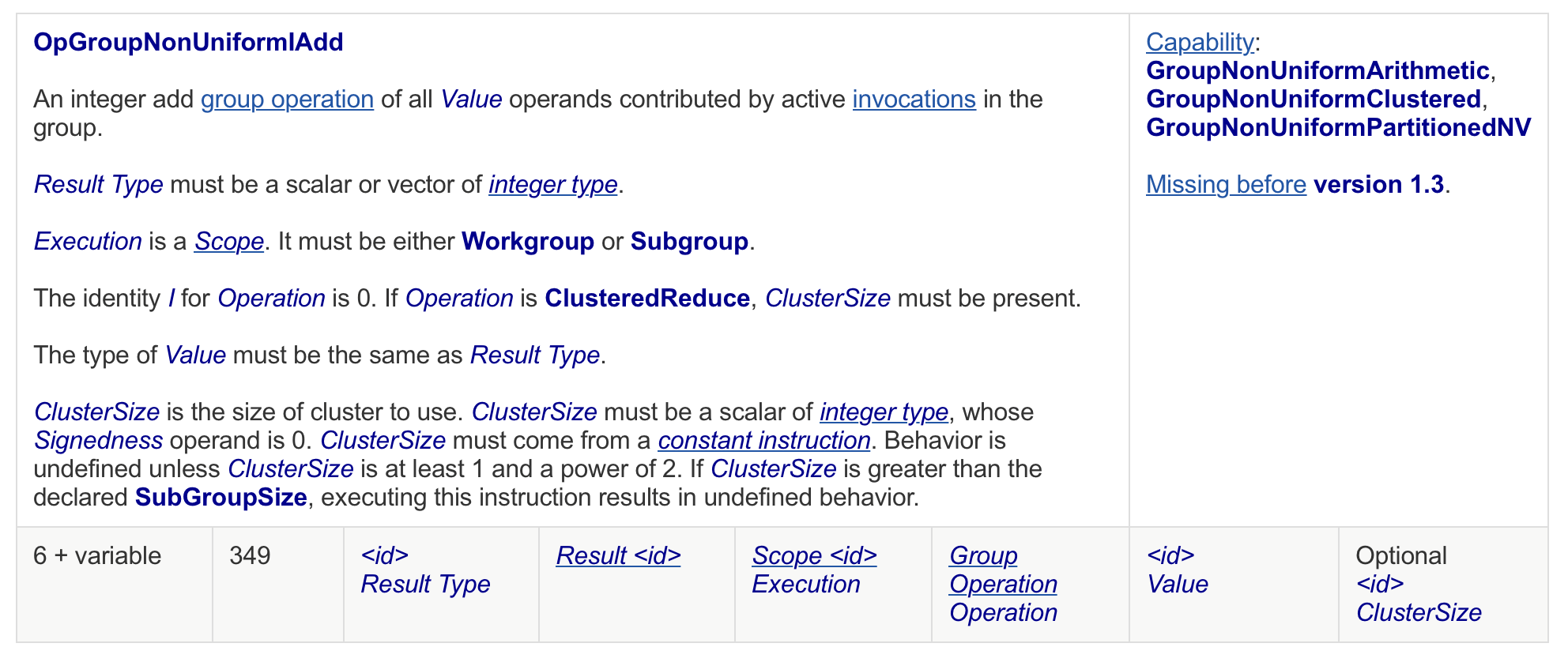
instead of a single element. In SPIR-V, what operations are available
for subgroups is documented under the section called Non-Uniform
Instructions. From here, we can find that the operations such
as OpGroupNonUniformIAdd exist. Now, consider the following
pseudocode:
v[I] = OpGroupNonUniformIAdd Reduce v[I]Now, I[0..31] will hold \sum s_0 and I[32..63] will hold \sum s_1. This evaluates to v[0..31] now holding 528 and v[32..63] holding 1552. What we now need to do is to synchronize the values from each subgroup. This can be achieved with the following logic:
if (s^j = 0) \implies v[s_i] = v[I] else v[I] = 0
Where v[I] is the current I value. This will move \sum s_0 to v[0] and \sum s_1 to v[1] while clearing any other v[i] to 0. So, now, v[0] = 528 and v[1] = 1552, and v[2..63] = 0 (it is worth noting that clearing to zero is effectively free for us, since the other I’s would be sleeping otherwise anyway). Followed by new subgroup reduction with the same synchronization logic, we get v[0] = 2080 while v[i \setminus 0] = 0.
In pseudocode we have done the following:
reduce(v)
iter = (len v) / SubgroupSize
while iter > 1
sync
reduce(v)
iter--This achieves sum reduction up to \bar{v} = 1024 while using only two (subgroup) sum operations. This is more efficient than the naive sum reduction on an I, but it does still leave optimizations on the table.
Sum reduction on vector values
Above we mentioned it is common practice to assign each I_{M[x,1,1]} to each of v[i]. However, this is not a strict requirement. In fact, we see from the semantics of the group operation the following on Result Type:
In SPIR-V, a vector is defined as follows:
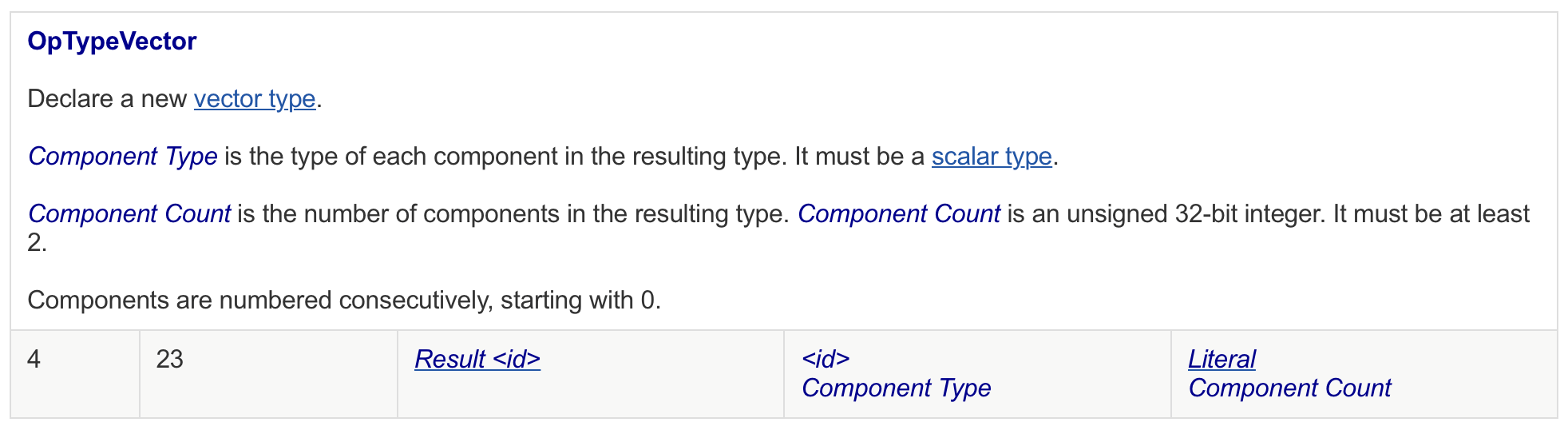
From further consultation of the SPIR-V specification we can find that vectors are limited to length of 4. This coincidentally means that we are leaving 4x performance on the table!
To use vectors, we need to redefine that each I loads a value from v with an ArrayStride of 16 (the scalar stride being 4). After this change, each I will load v[i..i+3] into its memory. Accessing I[0] will, as such, give us \{1,2,3,4\}. If we then increase \bar{v} to 128 and run the subgroup sum reduction, we
will find that I[0] will now hold
values according the following formula: \{\sum
s_i[0], \sum s_i[1], \sum s_i[2], \sum s_i[3]\}. In our example,
this corresponds to \{2016, 2048, 2080,
2112\}.
The problem now is that we need our scalar sum reduction to sum these values again. We can do this with subgroups again, using the code from the previous chapter. We must change our pseudocode to as follows:
reduce(v as vector4)
iter = (len v) / SubgroupSize
while iter > 1
sync
reduce(v as vector4)
iter--
reduce(v as scalar)Running the scalar reduction will yield us v[0] = \{8256, 0, 0, 0\}, while subsequently holding that v[i \setminus 0] = \{0,0,0,0\}. Effectively, we are able to sum reduce up to \bar{v} = 4096 while needing only three subgroup add operations.
Remarks
In our pseudocode, we call (len v) although we made a
remark earlier that \sum I cannot be
known. This is true, but there are two cases in which we know \bar{v} instead. These cases are:
- The input array is of type OpTypeRuntimeArray which allows us to call OpArrayLength.
- The input length is statically known. In this case, we can pass in
the whole
itervariable as either specialization constant, push constant, or some other form of uniform memory. The problem might be that for program compositions, evaluating the size of each subsequent phase might be tricky, but in most cases decidable (counterexample being, e.g., any phase following the filter function).
SPIR-V also supports matrix data structures up to the size of 4x4. This would in theory allow us to work with \bar{v} = 16 384, but at least for reduce this is not the case.
The constraint of 1024 and 4096 come from the fact that beyond this the subgroup indices are located in a different “workgroup”. We would need a new synchronization logic for every time that we are done with a given workgroup. I may update this post once I get around doing so.
What happens if you use vector 4 for an input size that is not divisable by 4? You could use some other vector type instead and fallback to scalar operations if nothing else is possible. This would require either specialization constants to be used or compiler phase to retrofit the current SPIR-V compute shader. In general, the same applies when the type of your result changes, e.g., when you use a scalar or a float.
Conclusion
In this post we described how we can do sum reduction using SPIR-V subgroups up to vector length of 4096. With SPIR-V, we are able to run this program on GPUs of different manufacturers using the Vulkan GPU API. As Vulkan is supported by Nvidia, AMD, and, e.g., Apple ARM among others, this allows us to build cross-compatible array operations similar to CUDA.
In general, programming GPU is tricky even for simple array operations, and while languages to do so are restrictive, the languages do exist. But, if we want to compete with CUDA, we are facing with a huge sunk cost of optimizing SPIR-V kernels, possibly by hand.
For more GPU stuff, you can follow me on Twitter, you can stargaze rivi-loader on Github, and amaze at the spaghetti of the final SPIR-V assembly code on the rivi-std repository, and even run the program using the rivi-std example (requires Vulkan installation which is a topic in itself, but do consult documentation on ash).
For every error found in this post, I will post a new array operation. Stay tuned!